Inspection and data capture.
Small supervised route, condition imagery, local notes, and report output for infrastructure or facility checks.
First proof laneAerosyn will not sell unfinished renders as product. The public platform story is the decision system: choose the job, map the autonomy loop, define safety gates, then select or build the machine body.
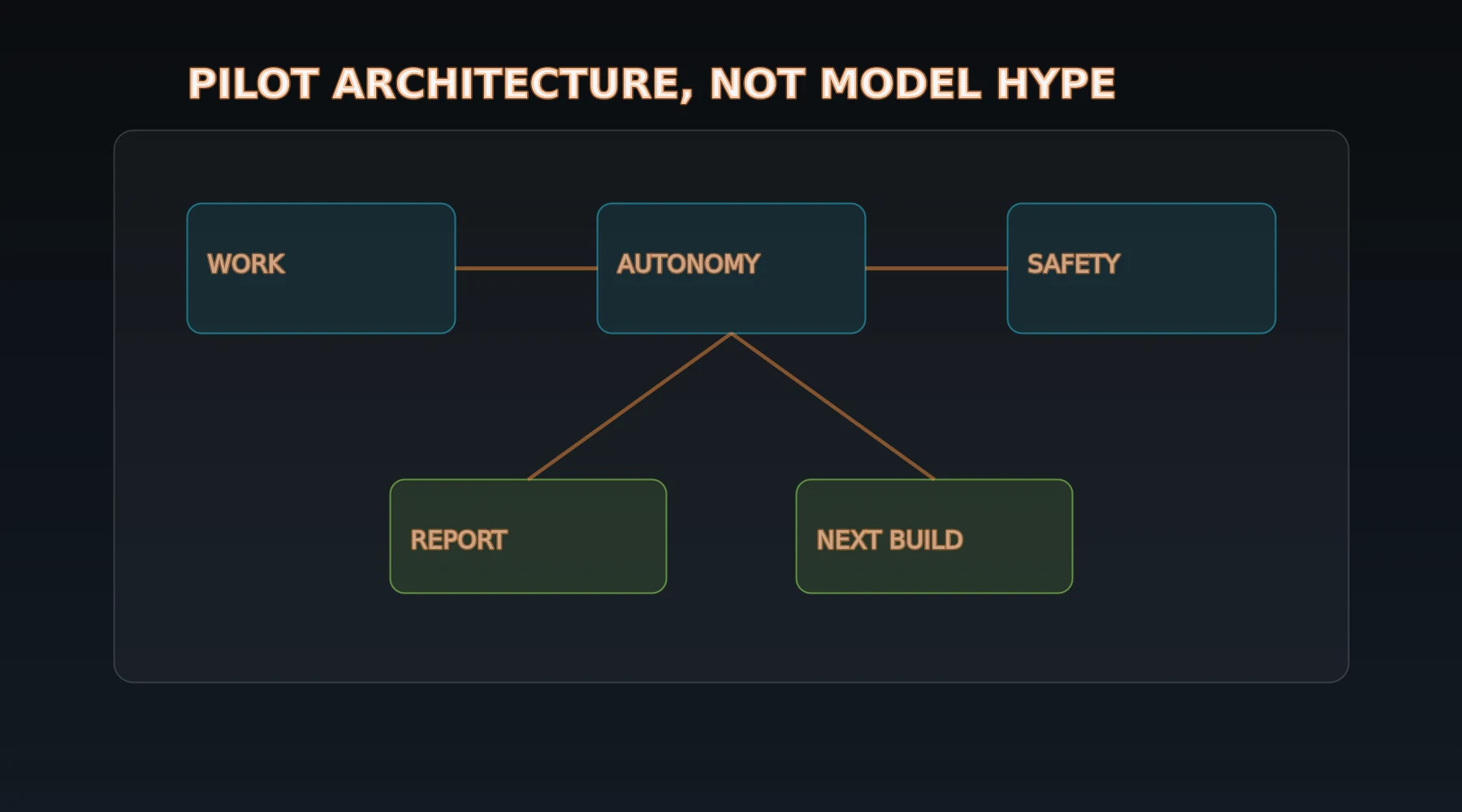
These are decision lanes, not claims that a finished product is ready. They help match a customer problem to the smallest useful pilot.
Small supervised route, condition imagery, local notes, and report output for infrastructure or facility checks.
First proof laneOperator-assisted routes, alerts, inventory checks, handoff points, and local event logs.
Operations laneFixed station checks, QA capture, machine-side reporting, and repeatable operator-assist workflows.
Factory laneOutdoor assets, drains, corridors, uneven ground, and supervised evidence capture.
Field laneHuman-in-the-loop tool or object interaction only after a precise safety and test boundary exists.
Prototype laneOnly for grant, government, or expert-reviewed settings where safety authority and site controls exist.
Grant laneThe body follows the job. If the proof can be captured with a small sensor rig, do that before committing to custom mechanics.